Fusion Autonomy @ WPI
Autonomous Driving Research Group at Embedded Computing Laboratory, Worcester Polytechnic Institute
WebpageFinished Projects
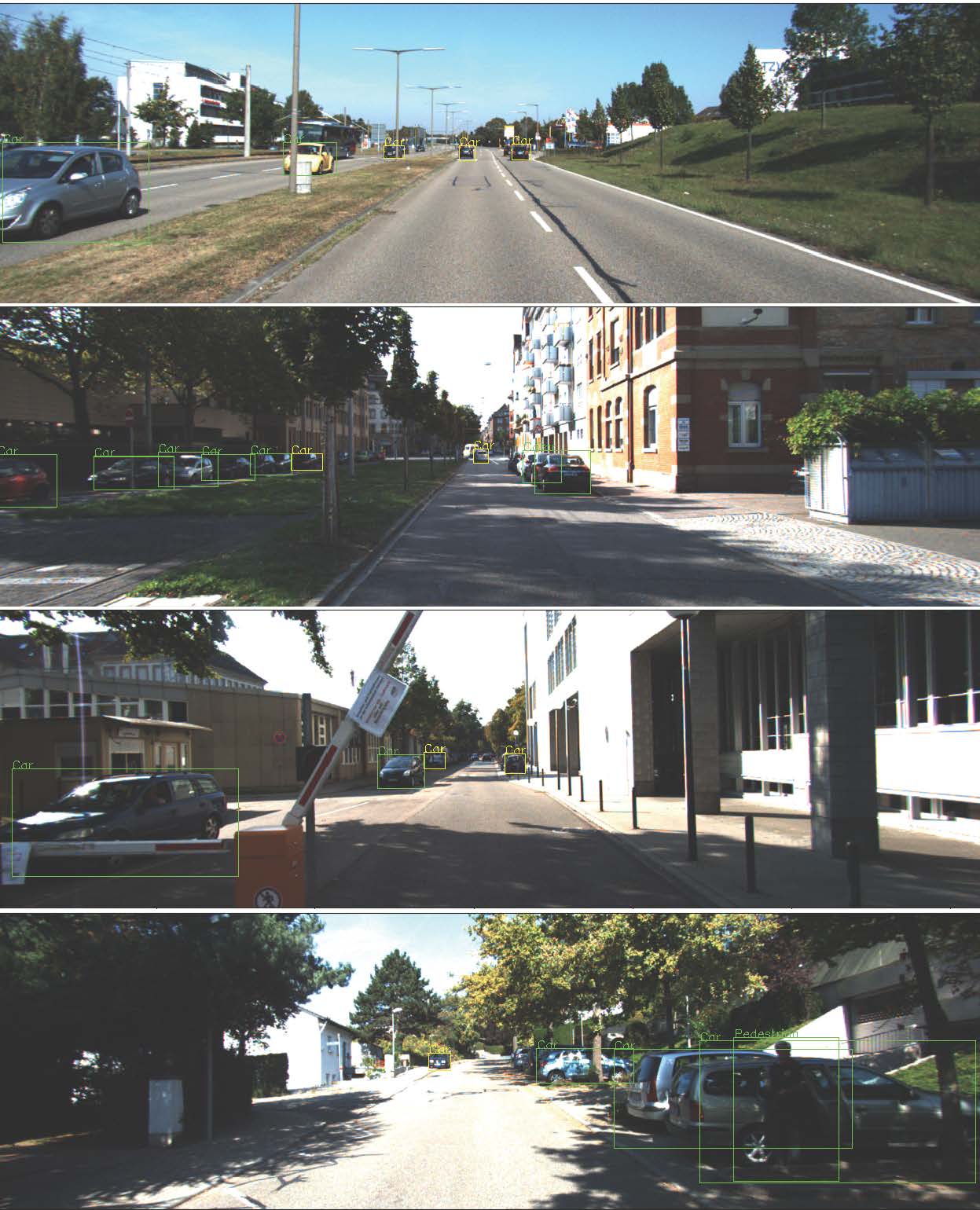
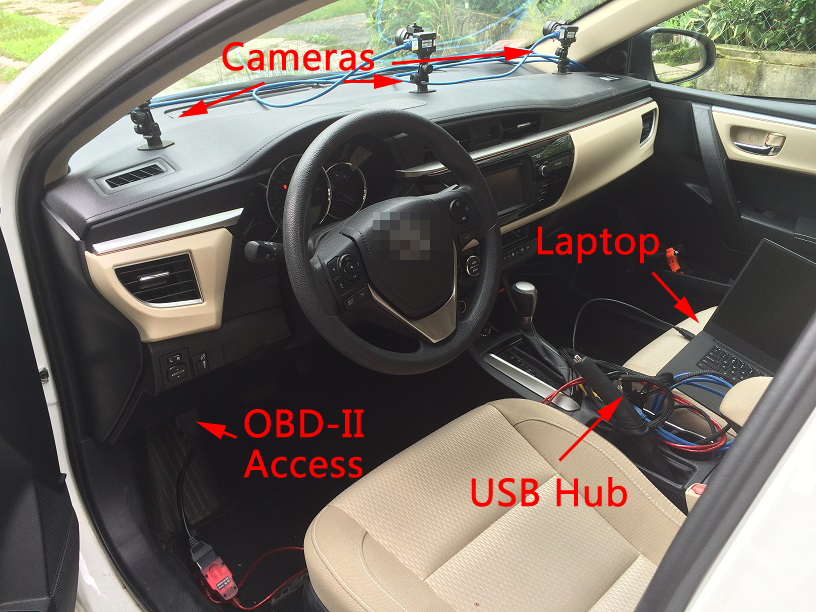
Understanding traffic scene via segmentation and object detection
We developed a deep learning based self-driving perception system which can detect moving objects and perform semantic segmentation for static surroundings simultaneously. We integrate object detection and semantic segmentation models...


Traffic sign and road marking detection and recognition on an FPGA
In this project, we developed a computer vision algorithm that can detect the traffic signs and road markings on the road. Machine learned based feature extraction and classification are employed...

ChipNet: LiDAR-based drivable region detection on an FPGA
In this project, we proposed CNN-based a segmentation algorithm that can process LiDAR data in real-time on a single FPGA. Traditional drivable region segmentation algorithms are mostly developed on camera...
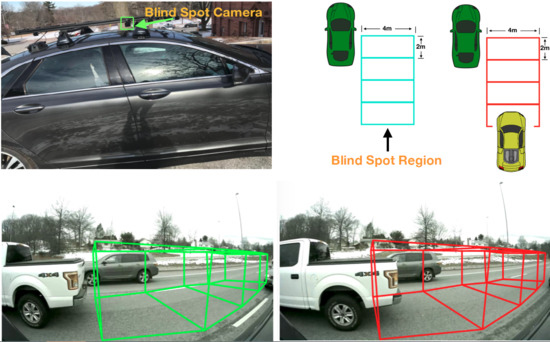
Blind spot detection with single camera and machine learning
Blind spot detection is an important feature of ADAS. We developed a camera-based deep learning method that accurately detects other vehicles in the blind spot, replacing the traditional higher cost...

High fidelity pedestrian detection with camera and IR
Pedestrian detection is a critical feature of autonomous vehicle or advanced driver assistance system. We developed a novel instrument for pedestrian detection by combining stereo vision cameras with a thermal...
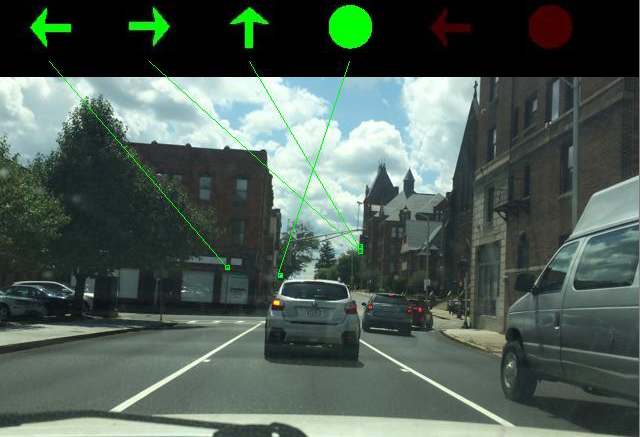
Traffic light detection and recognition
Automatic detection of traffic lights has great importance to road safety. We developed a novel approach that combines computer vision and machine learning techniques for accurate detection and classification of...